USING THE DATASET
Contents
Loading
init;
d=DatasetLoaderToulouse();
imgData = d.getImageDataAtIndex(3);
imgData = d.getImageDataAtImageName('img_1295');
width = size(imgData.img, 2);
height = size(imgData.img, 1);
Details on the data
size(imgData.img)
K = imgData.K
lines = imgData.lines
linesEq = imgData.linesEq
name = imgData.name
R_imu = imgData.R_imu
vp_association = imgData.vp_association
ans =
1080 1920 3
K =
1.0e+03 *
1.7572 0 0.9748
0 1.7532 0.5463
0 0 0.0010
lines =
1 995 709 366
265 1078 789 398
807 1077 943 483
1854 865 1548 567
276 542 218 1
359 1 404 474
1429 1 1392 510
9 992 1918 1023
381 535 1346 540
1795 816 224 797
linesEq =
629 708 -705089
680 524 -745072
594 136 -625830
298 -306 -287802
541 -58 -117880
-473 45 169762
-509 -37 727398
-31 1909 -1893449
-5 965 -514370
19 -1571 1247831
name =
img_1295
R_imu =
-0.3452 -0.9380 -0.0316
-0.2458 0.1229 -0.9615
0.9058 -0.3241 -0.2730
vp_association =
Columns 1 through 3
1 1 1
Columns 4 through 6
1 2 2
Columns 7 through 9
2 3 3
Column 10
3
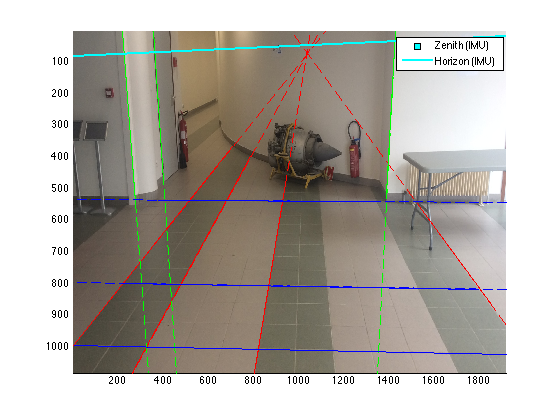
Display
axis([1 width 1 height]);
color = ['r', 'g', 'b'];
hold on;
imagesc(imgData.img);
for i=1:size(imgData.lines,1)
plot(imgData.lines(i,[1,3]), imgData.lines(i,[2,4]), color(imgData.vp_association(i)));
hline(cross([imgData.lines(i,1:2) 1]', [imgData.lines(i,3:4) 1]'), 'LineStyle', '--', 'Color', color(imgData.vp_association(i)));
end
zenith = imgData.K * imgData.R_imu * [0 ; 0 ; -1];
zenith = zenith / zenith(3);
horizon = imgData.Kinv' * imgData.R_imu * [0 ; 0 ; -1];
pzenith = plot( zenith(1), zenith(2), 's', 'LineWidth',1, 'MarkerEdgeColor','k', 'MarkerFaceColor', 'c', 'MarkerSize',6);
phorizon = hline(horizon, 'color', 'c', 'LineWidth',2);
legend(gca, [pzenith, phorizon], 'Zenith (IMU)', 'Horizon (IMU)');
axis ij;
hold off;